Siemens Tecnomatix Process Simulate 16是一款功能超级强大的电脑端数字制造设计工具软件,它帮助您将制造数字化,并将创新的想法和原材料转化为真实产品的过程,让整个流畅可以有条不紊的进行下去,不会出现错误。软件的设计内容覆盖全面,包括:装配规划、资源管理、工厂设计与优化、产品质量规划与分析、生产管理等等板块构成,对于汽车行业的制造有着很大的帮助。利用这个软件,你完全可以进行仿真模拟实验,在虚拟的环境中去做实验,大大减少了实验成本,并且软件内还有很多的辅助工具,能够提升实验的效率和准确性,并且能够根据实验情况及时的做出诊断报告,便于用户改进。本次小编为大家带来的是Siemens Tecnomatix Process Simulate 16破解版,内置破解补丁,可以有效激活软件,亲测有效,并且下文附带详细的安装教程(附破解教程),欢迎需要的朋友来48软件下载免费下载体验!~

安装教程(附破解教程)
1.在48软件下载下载并解压,使用软碟通 UltraISO来打开您Siemens.Tecnomatix.Process.Simulate.16.0.1.Win64.isz文件;
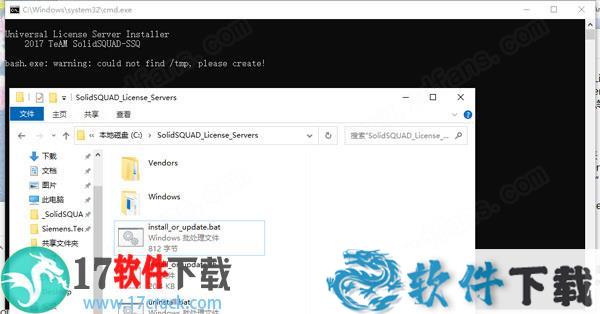
2.打开crack-server文件夹,分别解压SSQ_UniversalLicenseServer_Core_20180127075000.zip和SSQ_UniversalLicenseServer_Module_SiemensPLM_2020121808900.zip,然后将解压出来的Vendors文件夹复制到SolidSQUAD_License_Servers文件夹中,并将SolidSQUAD_License_Servers文件夹复制到C盘中,管理员身份运行install_or_update.bat,等待完成;
3.双击运行安装程序,点击安装选项;

4.点击Install以及可选安装CADTranslators 8.0.1 Win64;

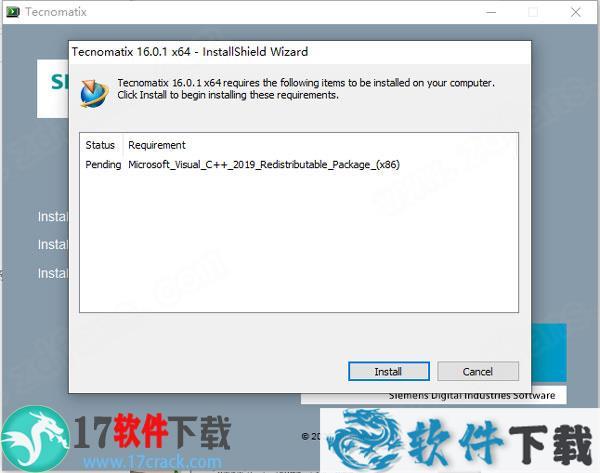
5.在跳出的窗口界面点击install进行下一步;
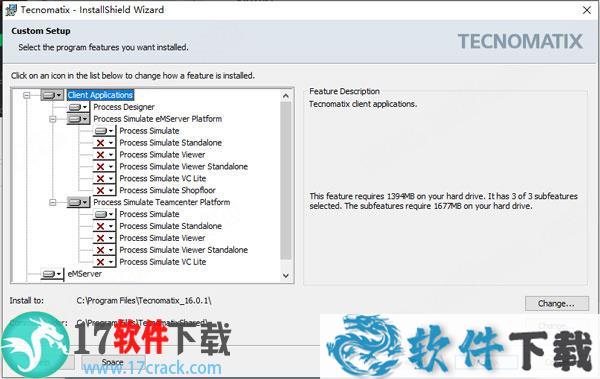
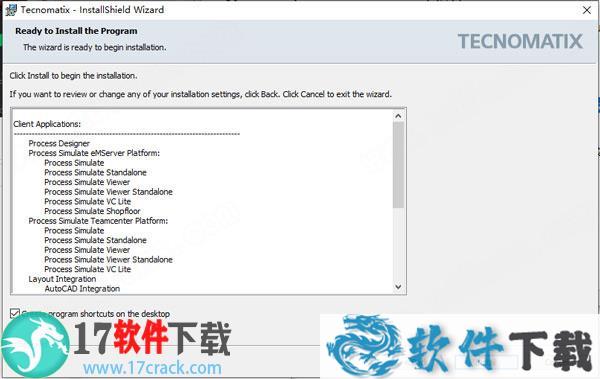
6.选择需要安装的组件内容;
7.选择软件安装路径,在安装时如果询问许可证服务器端口和名称的话请输入27800@localhost;

8.确认安装信息后点击install进行安装;
9.软件较大,安装需要耗时几分钟,等待安装完成后点击finish退出安装向导;
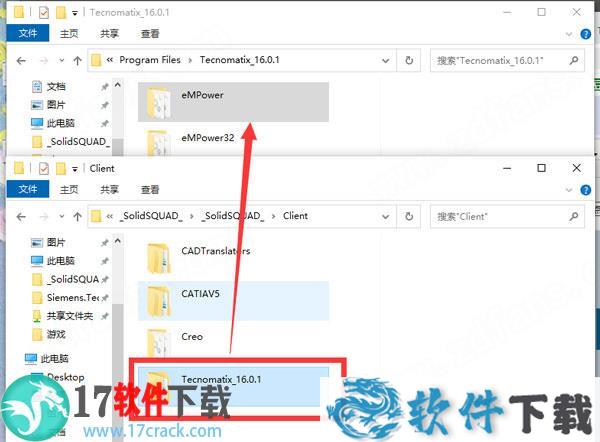
10.将SolidSQUAD_\Client下的Tecnomatix_16.0.1文件夹复制到安装目录中,点击替换目标中的文件,默认路径:C:\Program Files\Tecnomatix_16.0.1,对于CADTranslators 8.0.1也是同样的操作,将CADTranslators 文件夹复制到安装目录中,点击替换目标中的文件,默认路径:C:\Program Files\Tecnomatix\CADTranslators;
11.重启计算机运行软件即可畅享“破解版”啦!

支持功能
1.实时机器人(RTR)
通过过程仿真实时机器人集成(RTR),您可以连接到实时机器人控制器,该控制器自动为多机器人系统实时创建运动计划和联锁。
集成的解决方案消除了在计划机器人单元时花费在运动计划和互锁上的大量时间。
2.Artiminds
Artiminds机器人编程套件是该版本中的新增功能,它集成在Process Simulate中,为包括视觉和力控制在内的基于传感器的复杂机器人运动提供了解决方案。好处是无代码开发环境,使您可以使用视觉模板创建复杂的机器人动作,而无需具备机器人编程和本机机器人编程语言的专家。此外,您可以独立实施应用程序并在公司内部积累知识,从而减少对外部提供商的依赖。
3.流程模拟查看器
在版本16.0.1中,可以将Process Simulate Viewer作为Teamcenter和eMServer连接的应用程序使用,在Teamcenter上称为Process Simulate Viewer,在eMServer上称为Process Simulate Viewer。您从桌面上的Teamcenter上启动Process Simulate Viewer,它需要Teamcenter Manufacturing Access(TCMA)访问。
您还可以从eMServer上的Process Simulate Viewer中的Process Designer中打开研究。
4.鼠标配置增强
在此版本中,提供了用于配置鼠标按钮单击动作以及翻转鼠标旋转方向的新选项。
5.散件
您可以使用新的“分发零件”命令将一组相同的零件分发到指定的容器。该命令允许您指定要分发的零件数量,并且可以显示零件移动到箱中最终目的地的简短模拟。
6.SCL驱动输送机
现在,您可以在SCL编辑器中使用电报来控制传送带。电报会在每个时间间隔发出位置或速度以相应地驱动输送机。
注意:此功能仅限于新的概念输送机(不是角形或线性输送机)。
7.SCL连接信号
连接信号工具支持具有分配的结构化控制语言(SCL)代码的设备。添加此类设备将列出其所有输入(包括I / O)和输出。您可以为每个引脚或同时为所有加载的SCL设备自动创建新的学习信号。您可以使用预定义的基于规则的LB资源映射模板,将现有的研究信号手动或自动映射到SCL组件,默认情况下设置为ConnectSignalsToLBsTemplate.xlsx。
8.SCL新组件
现在,您可以定义一个新的SCL组件,方法是将研究资源对象加载到SCL编辑器中,然后为它分配SCL代码,其中包含变量列表和修改它们的一些实际代码(例如,驱动接头,移动传送带,或仅根据用户提供的逻辑计算输出)。
在用户界面中以图形方式区分SCL和LB
您可以将鼠标悬停在Connect Signals中加载的SCL设备上,以查看其已定义的LB和SCL入口和出口总数的列表:
将鼠标悬停在特定的SCL引脚上会显示一个SCL特定的图标,并提供有关所需信号数据类型的信息
9.VR导出包含透明度信息
在此版本中,完全透明(所有实体都是透明的)的对象在加载到VR时将保持其透明性。 但是,具有混合透明度的对象(某些实体是透明的,而某些实体是实体)则以实体而不是透明的方式加载。
10.做备注
现在,您可以将创建的注释附加到对象上。 将刚创建的注释移到对象附近,直到选择了对象。
现在,VR中的“注意”对话框将显示快照,并带有简短说明。 您可以使用“翻转”图标来显示带有问题详细说明的视图。 备忘状态显示在左上角,您可以轻松对其进行修改。
11.配置切线面
“选项”对话框中的“连续”选项卡包含新的“相切面”选项:相邻面之间的最大角度。 这使您可以根据相邻面之间的最大角度自动配置切线面选择。 因此,在选择切线面时(例如,在“连续过程生成器”中),系统会继续选择面,直到相邻面之间的角度超过您设置的值为止。
12.创建和编译新命令而无需关闭Process Simulate
在Visual Studio项目中编辑代码时,在编译过程中不再需要关闭应用程序。 这简化了调试过程,使您可以在单个工作流程中编辑,编译,运行和调试所有代码。 不必退出Tecnomatix应用程序并重新启动它。
13.Kuka虚拟机器人控制器(VRC)
使用Kuka机器人执行虚拟调试时,现在可以在Process Simulate和Kuka.OfficeLite VM之间建立并使用连接来模拟完整的虚拟机器人控制器(VRC)。
Process Simulate可从Kuka.OfficeLite读取信息或向Kuka.OfficeLite写入信息,包括联合值,信号值等,以使模拟可视化并与VRC交互。
14.ABB虚拟机器人控制器(VRC)服务器实时
现在,当您使用ABB机器人执行虚拟调试时,您可以在Process Simulate和RobotStudio应用程序之间建立并使用连接来模拟完整的虚拟机器人控制器(VRC)。
Process Simulate可从RobotStudio读写信息,包括关节值,信号值等,以使仿真可视化并与VRC交互。
15.并行机器人任务-FANUC
现在,您最多可以为FANUC控制器添加八个并行任务,这些任务显示在“机器人模块”对话框的“后台逻辑”列表中。
在模拟过程中,涉及到后台逻辑的执行的消息报道,在模拟监控,如果在模拟监视器设置对话框中相应选项启用。 下图显示了带有新的并行任务消息选项的16.Fanuc VRC增强功能
?背景逻辑选项已添加到“设置”菜单,并存储在注册表中。
?信号监控现在可以避免多机器人配置的未更新信号。
?活动警报已由Fanuc TechOps更新
?现在,在路径的开头对WAIT命令执行SetSignal。
17.上传/下载多臂安川
在此版本中,您可以通过选择eMServer和Teamcenter的同步操作从机器人系统复合设备上载和下载多臂Yaskawa机器人。
软件特点
1.浏览生产设施的数字双胞胎
访问在其地理环境中显示的生产设施的基于云的3D模型。
2.调试自动化系统虚拟化
优化您的自动化系统,并在安装和生产之前在虚拟环境中调试PLC编程。
3.进行以人为中心的设计和规划
使用Jack和Jill虚拟人,改善您的设计的人体工程学以及工作场所环境的安全性,效率和舒适性。
4.同步流程设计以提供更好的计划
在单个环境中管理工程和制造物料清单以及流程清单,并提供更好的制造计划。
5.进行装配仿真以进行虚拟过程验证
将装配仿真用于所有过程操作步骤及其在制造工艺计划中定义的详细信息的虚拟验证。
6.优化生产物流和物料流
模拟您的生产系统,以提高制造精度和效率,同时提高产量和性能。
使用集成的生产线规划环境,配置数字工厂设计的布局并配置3D工厂布局,以实现高效的工厂运营。
重要提示
提取码:zo0k

 艾奇视频电子相册制作软件官方安装版 V5.81.120.10
艾奇视频电子相册制作软件官方安装版 V5.81.120.10 美图秀秀官方正式版 V6.5.5.0
美图秀秀官方正式版 V6.5.5.0 Adobe Illustrator CS6简体中文官方安装版 V22.0.0.243
Adobe Illustrator CS6简体中文官方安装版 V22.0.0.243 友锋电子相册制作标准版 V9.9.7.2896
友锋电子相册制作标准版 V9.9.7.2896 Adobe Photoshop CC 2018中文绿色精简版 V19.0.0
Adobe Photoshop CC 2018中文绿色精简版 V19.0.0 Snipaste 64位绿色中文版 V2.5.4
Snipaste 64位绿色中文版 V2.5.4 GifCam中文绿色版(动画录制) V6.0
GifCam中文绿色版(动画录制) V6.0 艾奇MTV电子相册视频制作软件官方安装版 V6.50.618
艾奇MTV电子相册视频制作软件官方安装版 V6.50.618 CorelCAD 2016破解版 V16.2.1.3056
CorelCAD 2016破解版 V16.2.1.3056 CAD迷你家装官方安装版 V2020R2
CAD迷你家装官方安装版 V2020R2







 今日头条官方正版 V8.8.8V8.8.8 / 43.90 MB
今日头条官方正版 V8.8.8V8.8.8 / 43.90 MB 音乐雷达安卓版 V13.26.0-230414V13.26.0-230414 / 29.34MB
音乐雷达安卓版 V13.26.0-230414V13.26.0-230414 / 29.34MB 扫描全能王安卓版 V6.20.0v1.0 / 92.05 MB
扫描全能王安卓版 V6.20.0v1.0 / 92.05 MB 万能空调遥控器破解版 V1.4v1.4 / 45.52MB
万能空调遥控器破解版 V1.4v1.4 / 45.52MB 佛教音乐安卓版 V3.3.5V3.3.5 / 59.50MB
佛教音乐安卓版 V3.3.5V3.3.5 / 59.50MB 百度文库免费版 V8.0.53 8.0.53 / 21.75 MB
百度文库免费版 V8.0.53 8.0.53 / 21.75 MB 萌宝挖挖挖手游安卓版 V1.0益智游戏
萌宝挖挖挖手游安卓版 V1.0益智游戏 街头音乐学院破解版 V1.0益智游戏
街头音乐学院破解版 V1.0益智游戏 粉红钢琴大师游戏官方版 V1.1益智游戏
粉红钢琴大师游戏官方版 V1.1益智游戏 三国杀单机版 V4.0.0模拟经营
三国杀单机版 V4.0.0模拟经营 是魔女哦免费版 V0.0.20益智游戏
是魔女哦免费版 V0.0.20益智游戏 全民接快递百度版 V1.0模拟经营
全民接快递百度版 V1.0模拟经营